利用遙測遙控實現遠距離測量、控制和監視的系統。在遙測遙控系統中,測量裝置和執行機構設置在被控物件附近,被控物件參數的測量值通過遙測通道發向遠距離的測控站,測控站的控制指令通過遙控通道發向執行機構。遙測遙控系統的理論和技術涉及採樣定理、編碼理論、多工、調製技術、同步技術、信號檢測和估計等方面。遙測遙控系統是在自動控制、傳感技術、微電子技術、電腦技術和現代通信技術的基礎上不斷完善和發展起來的,在國民經濟、科學研究和軍事部門,如無人駕駛飛機、導彈、人造衛星星、宇宙飛船、航天飛機、核工業、電力系統、輸油和輸氣管線、空中交通管制、鐵路調度、地震預報臺網、無人自動氣象站、城市公用事業、醫療診斷等方面都有廣泛的應用。
發展簡史 最早的是機械式遙測遙控系統,測控范圍隻有幾米。後來采用流體耦合方式(液壓或氣動),測控范圍擴大到幾百米。19世紀末出現電遙測遙控系統,利用架空明線或電纜作為傳輸介質,稱為有線遙測遙控系統。1905年法國物理學傢 E.佈蘭利用電磁波使一定距離外的小燈泡發光,電動機轉動,控制原理上屬於開環無線遙控。1906年西班牙工程師克維多用無線電控制汽艇獲得成功,這是首次采用閉環無線遙控。第一次世界大戰期間,1917年3月2日德國進攻紐波特港時第一次在實戰條件下由飛機對滿載炸藥的快艇進行無線遙控。美國陸軍從1917年開始設計遙控飛行器(無人駕駛飛機),到20世紀20年代末遙控飛行器的往返飛行距離已達1 000千米。1930年無線遙測開始用於氣象,利用氣球裝載測量儀器測量高空的溫度、壓力、溫度等參數並發回地面測量站。第二次世界大戰期間,無線遙測遙控得到迅速發展,德國研制成V−2導彈和萊茵號防空導彈。1941~1954年先後研制成功飛機和火箭用的調頻/調頻遙測系統,以及脈幅調制和脈寬調制等遙測系統。50年代研制出脈碼調制遙測系統,標志著從模擬式遙測系統發展到數字式遙測系統。60年代後無線遙測遙控在工業上開始得到廣泛的應用。70年代後由於微電子學和微處理機的迅速發展,數字式遙測遙控系統逐漸取代模擬式遙測遙控系統,並出現可編程序遙測遙控系統、自適應遙測遙控系統和分集式遙測遙控系統。現代航天遙測遙控系統的最大傳輸距離可達2.4億千米,能傳輸每幀2.4兆比特的數字圖像信息。在編碼和譯碼方面發展瞭各種快速算法(如美籍中國科學傢張肇健等人用數論方法簡化裡德–所羅門碼)。隨著超大規模集成電路的開發,使卷積編碼、維特比譯碼和多位糾錯編碼在衛星通信和深空探測中得到成功的應用。航天測控系統已發展到利用一個S波段的載波作為傳輸測軌、遙測、遙控、通信圖像和數據的共同信道,稱為S波段統一載波測控系統,使設備大大簡化。
基本組成 包括遙測系統和遙控系統。它們可以單獨使用,也可以結合成一個整體。遙測遙控系統一般由控制端、信道和被控端三部分組成(圖1)。
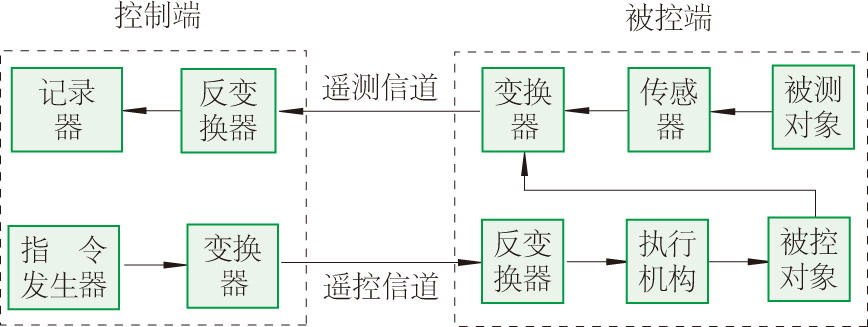 圖1 遙測遙控系統原理圖
圖1 遙測遙控系統原理圖
圖2是遙測系統的框圖。在發送端由傳感器感受被測對象的參數將其轉換成電信號,再通過信號調節器變換成適合采集的規范化電壓信號。多路復用調制器將各路信號按一定體制組合去調制發射機的載波,經功率放大後通過信道傳送到遠處的接收端。接收端收到信號送到接收機進行載波解調,再經過多路復用解調器恢復出各路遙測信號,由終端設備記錄、處理和顯示,並按要求將遙測數據傳送到控制端。圖3是遙控系統的框圖。控制端包括監控臺、指令發生器、編碼器、指令傳輸設備的發射部分,監測系統的接收部分。被控端包括指令傳輸設備的接收部分、譯碼器、執行機構和被控對象監測系統的發射部分。指令發生器用來產生標準遙控指令及與誤差信號相對應的指令,編碼器的主要組成部分是編碼矩陣,用來把指令信號編成碼組,以區別指令,提高可靠性、抗幹擾性和保密性。監測系統用來監測被控對象的實際狀態,並與規定的狀態在計算機中進行比較,給出誤差信號,指令發生器產生遙控指令,通過指令傳輸設備送到被控端,使執行機構動作,改變被控對象的實際狀態。此實際狀態又通過監測系統送到計算中心進行比較,直到被控對象的實際狀態與規定狀態一致。常用的監測系統有電視、雷達和遙測等。指令傳輸設備包括調制器、發射機、發射天線、接收天線、接收機、解調器等。譯碼器把收到的指令碼組譯成原來的指令信號。執行機構是使被控對象按遙控指令動作的機構,二值指令的執行機構是繼電器或電動機,多值指令的執行機構是同步電機或直流放大器。
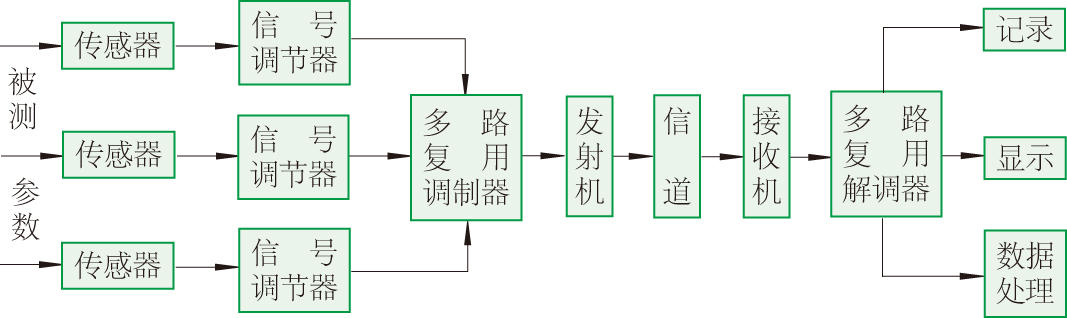 圖2 遙測系統框圖
圖2 遙測系統框圖
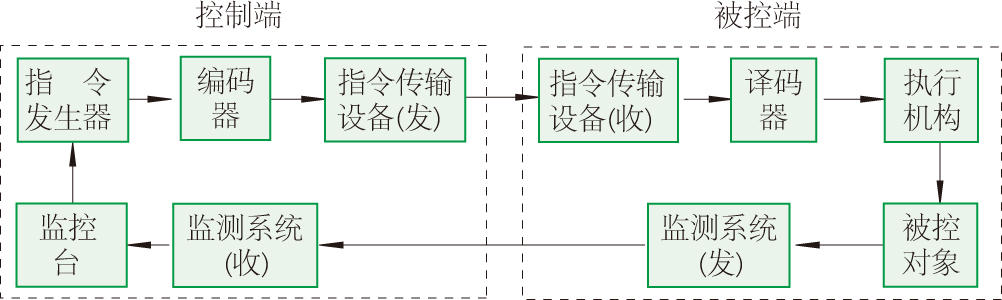 圖3 遙控系統框圖
圖3 遙控系統框圖
主要類型 遙測遙控系統可按8種方式分類:①按信號傳輸介質分為有線和無線遙測遙控系統。②按信號傳輸方式分為直接傳輸式和載波傳輸式。③按信號變換方式分為模擬式和數字式。④按測控方式分為開環和閉環遙測遙控系統。⑤按多路劃分原理分為時分制、頻分制和碼分制。⑥按調制方式分為脈幅調制–調頻–調頻三重調制(PAM–FM–FM),調頻–調頻二重調制(FM–FM),脈寬調制(PDM),脈位調制(PPM),脈碼調制(PCM)等。⑦按系統結構分為1∶1(一個測控站對一個被控對象)、(1∶1)×N(N個1∶1)、M∶N(M個測控站和N個被控對象,每個測控站對N個被控對象)、1∶N(一個測控站對N個被控對象)4種工作方式。⑧按操作方式分為一次動作型、二次動作型和三次動作型。
技術要求 在設計和選擇遙測遙控系統時一般遵循下列技術要求:①準確度。②可靠性。通常誤動作率為10–9~10–8。③工作容量。指系統的信息傳輸能力。④抗幹擾能力。⑤動作速度。⑥工作頻段。國際上規定從1970年7月1日起遙測隻能使用兩個頻段:1 435~1 535兆赫作為飛行器和導彈試驗用,2 200~2 300兆赫作為各類遙測用,並規定瞭3種通頻帶寬,即窄頻帶(<1兆赫),中頻帶(1~3兆赫),寬頻帶(3~10兆赫)。⑦通用性。⑧經濟性。