導引和控制導彈按選定的規律調整飛行路線並導向目標的全部裝置。亦稱導彈導引和控制系統。其功能是測量、計算導彈實際飛行路線和理論飛行路線的差別,形成制導指令,經過放大和轉換,由伺服機構調整導彈的發動機推力方向或舵面偏轉角,控制導彈的飛行路線,以允許的誤差(脫靶距離)靠近或命中目標。
簡史 導彈制導系統是在綜合利用自動控制理論,航空和慣性儀錶,雷達、電子電腦、鐳射、紅外和電視等技術的的基礎上發展起來的。1932年,美國火箭技術科學傢R.H.戈達德首先使用陀螺儀和時間程序機構來穩定和控制一枚探空液體火箭。第二次世界大戰期間,德國E.施泰因霍夫和T.佈赫霍爾德設計的V-2導彈的制導系統,是慣性制導系統的雛形。在此期間,德國和其他一些國傢還研制過多種防空導彈的制導系統,雖然都沒有達到實用階段,但證明瞭導彈可用雷達波束導引。同時,研究瞭用於空空導彈和反坦克導彈上的光學瞄準的有線指令制導系統。戰後,一些國傢在此基礎上又發展瞭各種類型的導彈制導系統。
地(潛)地導彈制導系統 蘇聯從研制SS-3導彈的制導系統開始,經歷瞭五個階段,發展為第一代洲際彈道導彈SS-6的慣性制導系統。在美國,佈赫霍爾德指導瞭“紅石”(Redstone)地地彈道導彈制導系統的設計工作。W.S.霍伊塞曼和J.S.法裡爾等以“紅石”導彈為基礎,研制成“丘辟特”(Jupiter)導彈的制導系統。20世紀60年代,霍伊塞曼又將此系統改造後用於“土星”(Saturn)運載火箭上。美國航空工程師C.S.德雷珀等在50年代設計瞭“雷神”(Thor)導彈的制導系統,以後又設計瞭“民兵”(Minuteman)洲際導彈的慣性制導系統。70年代,美國又研制成“戰斧”(Tomahawk)巡航導彈所采用的慣性制導加地形匹配制導的復合制導系統。
防空導彈制導系統 50年代,出現瞭用雷達波束制導或無線電指令制導的艦空導彈、地空導彈。60年代以後,為適應防空導彈向多樣化、系列化方向發展的需要,研制瞭多種新型的制導系統。如美國用於中低空防空的“霍克”(Hawk)導彈,采用瞭無線電半主動尋的制導;蘇聯SA-7便攜式防空導彈,采用紅外尋的制導,並采用導彈自旋、脈沖調寬的控制方法。70年代,由於激光技術的發展,出現用激光波束制導的瑞典RBS-70小型防空導彈。70年代後期,美國“愛國者”(Patriot)防空導彈采用復合制導,能同時制導數枚導彈對付多個來襲目標。
空空導彈制導系統 50年代,多數采用無線電雷達波束制導,有的采用紅外尋的制導。限於當時的制導技術水平,載機隻在尾追敵機時,才能發射導彈攻擊對方,制導距離較近。60年代,美國“麻雀”-Ⅲ(Sparrow-Ⅲ)空空導彈,采用攻擊范圍較大的無線電半主動尋的制導系統。70年代,英國的“空中閃光”(Sky Flash)空空導彈,也采用這種制導系統,並增大瞭制導距離。美國采用紅外尋的制導的“響尾蛇”空空導彈幾經改進後,載機基本上可在各種方位上發射導彈攻擊對方。
空地導彈制導系統 由於空地導彈的射程一般都在幾十公裡以上,因此,從50年代開始就采用復合制導,如當時蘇聯的AS-1空地導彈,飛行初段采用程序控制,中段采用無線電波束制導,末段采用半主動尋的制導。60年代,美國用於攻擊地面雷達的“百舌鳥”(Shrike)空地導彈,由於攻擊距離較近,采用全程無線電被動尋的制導。70年代,美國“小牛”(Maverick)空地導彈,采用幾種類型的導引頭,白天作戰采用電視制導,夜間作戰采用激光制導和紅外成像制導。70年代後期,法國的“飛魚”(Exocet)空艦導彈,飛行初段采用無線電高度表控制飛行高度,末段采用無線電主動尋的制導,能在距海面2~5米高度飛行,攻擊軍艦。
從50年代到60年代,蘇聯的“耐火箱”(Sagger)和美國的“陶”(Tow)反坦克導彈,都采用光學瞄準的有線指令制導系統。70年代,美國研制的“銅斑蛇”(Copper-head) 反坦克炮彈,采用激光半主動尋的制導。
在中國,火箭專傢錢學森於1954年著的《工程控制論》(第一版),奠定瞭中國前期的導彈制導系統研制的理論基礎。1980年5月,中國向太平洋海域發射洲際運載火箭成功,標志著中國的火箭制導技術進入新的階段。同年10月,錢學森和宋健著的《工程控制論》(第二版),又充實和發展瞭導彈制導系統理論。
組成 導彈制導系統按功能可分以下三個部分(圖1):
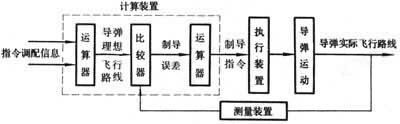 圖1 導彈制導基本原理
圖1 導彈制導基本原理
測量裝置 用以測量導彈和目標的相對位置或速度(包括角度、角速度等)。攻擊活動目標時,通常用雷達或可見光、紅外、激光探測器;攻擊地面固定目標時,用加速度表、陀螺儀等組成慣性測量裝置,也有用電視或光學等測量儀器的。
計算裝置 用以將測量裝置所測得的導彈和目標的位置和速度,按選定的導引規律加以計算處理,形成制導指令信號。
以上兩個部分可安裝在導彈上,也可安裝在地面或其他載體上。
執行裝置 用以放大制導指令信號,並通過伺服機構驅動導彈舵面偏轉或調整發動機推力方向,使導彈按制導指令的要求飛行,同時對導彈姿態進行穩定,消除外界幹擾對導彈飛行的影響。執行裝置必須安裝在導彈上。
分類 導彈制導系統大致可分為四類:
自主式制導系統 在制導過程中不需要提供目標的直接信息,也不需要導彈以外的設備配合,能自行操縱導彈飛向目標。主要用在攻擊地面固定目標的導彈上。可采用幾種制導方式,但主要是慣性制導。慣性制導的優點是:不需要任何外界信息,就能自動地根據飛行時間、引力場的變化和導彈的初始狀態,確定導彈瞬時的運動參數,因而不易受外界幹擾。目前,大多數地地彈道導彈,如美國的“大力神”(Titan)、“民兵”洲際彈道導彈等都采用慣性制導。隨著制導技術的發展,還可采用天文或地形地圖匹配的方式來提高制導精度。大部分地(潛)地導彈采用自主式制導系統。
尋的制導系統 其測量裝置安裝在導彈上,通常稱導引頭。能感受目標輻射或反射的無線電、熱和光輻射波。根據測量到的目標和導彈的相對位置、速度等參數,在導彈上形成制導指令,操縱導彈飛向目標。其特點是制導精度較高,但制導距離不能太遠。多數空空導彈和一部分地空導彈采用這種制導系統。尋的制導根據感受到目標信息的來源,可分為主動、半主動和被動式尋的等制導方式。
遙控制導系統 由導彈外的指揮站,測定導彈和目標的相對位置,並給導彈發出制導指令,通過導彈上控制裝置操縱導彈飛向目標。最常見的是無線電指令制導,不少防空導彈如美國的“奈基”-Ⅱ(Nike-Ⅱ),采用這種制導方式,其缺點是易被敵方發現和幹擾。其他還有有線指令制導、無線電波束制導和激光波束制導等。遙控制導主要用於反坦克導彈、空地導彈、防空導彈、空空導彈和反彈道導彈導彈。
復合制導系統 導彈從發射到命中目標,一般分初始段、中間段、末段三個飛行階段。導彈在飛行過程中,同一階段或不同階段采用兩種以上制導方式的,稱為復合制導系統。它是以上各種制導系統的組合。采用復合制導系統,可增大制導距離,提高制導精度和抗幹擾能力。現代某些防空導彈、岸(艦)艦導彈和反彈道導彈導彈等都采用復合制導系統。
導引規律 導引導彈攻擊目標時,導彈飛行路線應遵循的規律。當攻擊活動目標時,通常有五種導引規律:
① “追蹤法”。使導彈的速度方向總是對準目標(即圖2中夾角β=0)。在導彈尾追目標和目標速度不大的情況下,此法簡單而有效。但當導彈從側面攻擊目標或目標速度較大時,要求導彈能急速拐彎方能奏效。
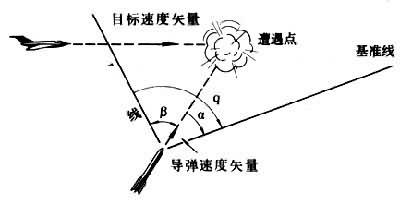 圖2 導彈攻擊目標示意圖
圖2 導彈攻擊目標示意圖
② “前置角法”。保持視線(導彈與目標的連線)與空間某固定基準的夾角(即圖2中夾角q)為常值,使導彈始終按照與目標相遇的路線飛行。此法同獵人打馳兔相似。
③ “比例導引法”。它包括以上兩種方法,使導彈在目標機動時也能很好地實施攻擊。以上三種導引規律,用尋的制導較易實現。
④ “三點法”。在整個制導過程中,目標、導彈和指揮站三者始終保持在一條直線上。指揮站可以是固定的,也可以是活動的(如艦載、機載導彈設在載體上的指揮控制裝置)。其缺點與“追蹤法”一樣,當目標速度較大時,導彈也要作較大的機動方能奏效。
⑤ “位置前置點法”。導彈的位置要超前目標和指揮站的連線,形成一個角度。隨著導彈與目標接近,此角逐漸減少,最後為零。這樣可使導彈的飛行軌道比較平直,降低瞭對導彈機動性的要求,但要增加對目標的測量信息。後兩種導引規律,用遙控制導較易實現。
使用彈道導彈攻擊地面固定目標時,通常采用程序預定導引法。導彈發射後在主動段按一定程序拐彎,飛出大氣層達到一定的速度和規定的彈道傾角時,發動機關機。此後,導彈開始被動段的自由飛行,最後進入大氣層而命中目標。發動機關機時,導彈速度的大小和方向,是影響命中精度的重要參數,而制導系統的主要任務,就是使它們符合預定的要求。70年代以後發展的彈道導彈,也有的在主發動機關機後仍能控制導彈飛行,提高瞭制導精度。
此外,還可用現代控制理論的最優控制原理,求出導彈接近目標的最優飛行路線。由於所關心的指標不同,得出的最優飛行路線也不同。
制導精度 由於制導系統不夠完善而造成導彈命中目標誤差的度量。它是評價導彈制導系統質量的主要指標之一。攻擊活動目標的導彈,制導精度主要取決於測量裝置的測量精度、計算裝置的性能、導彈的機動能力等。當測量裝置為雷達時,制導精度常受雷達測量的系統誤差和閃爍噪聲的影響,距離愈遠,誤差愈大。為此,可采用復合制導(如先遙控、後尋的制導)來提高制導精度。
80年代以來,采用紅外尋的制導的導彈,其制導誤差僅有幾米甚至能直接命中目標。但制導距離一般較近,且在氣候惡劣時不能應用。采用無線電尋的制導的導彈,制導誤差約十幾米。選擇合適的導引規律,也能提高制導精度。不帶末制導的彈道導彈,除因制導系統不完善引起的制導誤差外,尚有發動機不能準時關機,再入飛行誤差和瞄準目標誤差等造成的非制導誤差。采用慣性制導的導彈,加速度表誤差和陀螺儀漂移是制導系統的主要誤差源。當陀螺儀漂移率為0.02度 /小時(在1g重力加速度作用下)時,對射程10000公裡的彈道導彈,可達473米(公算值)。可采用追蹤星光或其他方法來修正,以提高命中精度。目前,實用的陀螺儀漂移率已達0.002度/小時(在1g重力加速度作用下)。50年代後期,美國“大力神”洲際彈道導彈的圓公算偏差為3公裡左右。70年代,美國“民兵”-Ⅲ洲際彈道導彈的圓公算偏差為320米左右。這兩種導彈均采用慣性制導。80年代初,美國“三叉戟”-Ⅱ(Trident-Ⅱ)潛地彈道導彈,采用慣性加星光制導,圓公算偏差為400米左右。帶地形匹配的“戰斧”巡航導彈的圓公算偏差在100米以內。正在發展中的“高級慣性參考球制導系統”可使彈道導彈的制導精度進一步提高。