炮兵測量距離的光學儀器。有光學測距機和鐳射測距機兩類。
光學測距機通常由雙筒望遠境、距離測量機構、方向測角機構、高低測角機構和三腳架組成(圖1)。測距的基本原理是:當目標射來的光線通過測距機兩端的入射視窗進入儀器時,兩入射光線的光軸相互平行,光軸間的距離構成測距機的基線長,目標對基線構成視差角。目標距離等於基線長除以視差角的正切函數,基線為固定值,根據視差角即可得出目標距離。在測距機內裝有測量視差角的裝置,經過機構轉換便便可讀出目標距離。測距誤差與所測距離的平方成正比,與基線長度和倍率的乘積成反比。地炮測距機的基線一般為0.3~2米,放大倍率5x~20x,視場3°~10°,測距范圍50~20000米。高炮測距機的基線一般為1~3米,放大倍率10x~32x,視場1°50′~6°,測距范圍500~30000米。
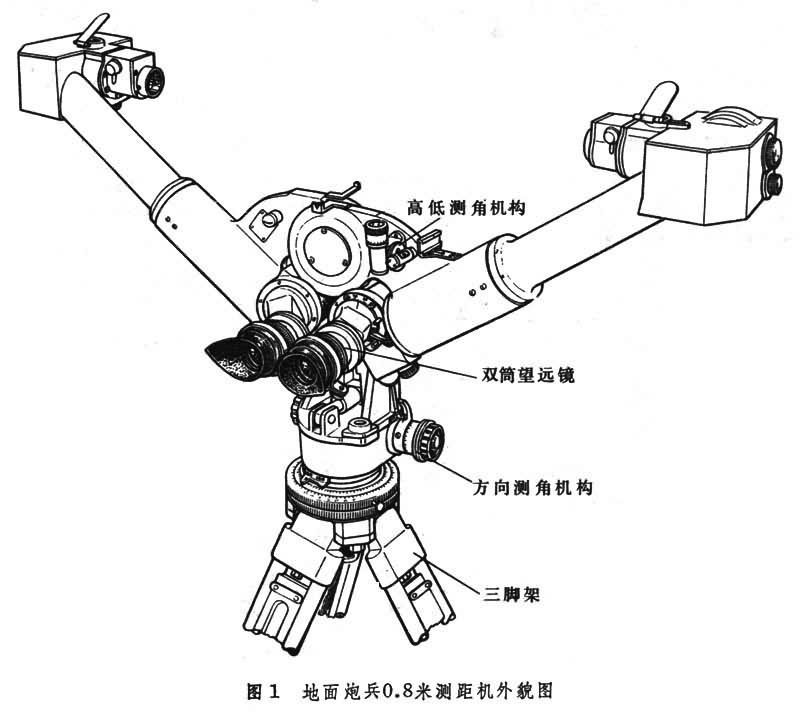 圖1 地面炮兵0.8米測距機外貌圖
圖1 地面炮兵0.8米測距機外貌圖
激光測距機通常由發射裝置、接收裝置、計數器、顯示器、瞄準鏡、電源、方向測角機構、高低測角機構和三腳架組成(圖2)。工作時,瞄準鏡先瞄準目標,發射裝置的激光器發出激光光束;激光光束到達目標後被反射回來,並被接收裝置接收;根據光波往返所需時間之半乘光速等於距離的原理,計算器進行測算、計數,並在顯示器上顯示距離。測距誤差一般為5~10米。手持式激光測距機的測距范圍一般為150~10000米,重2~3千克。支架式激光測距機的測距范圍一般為200~20000米,重5~30千克。
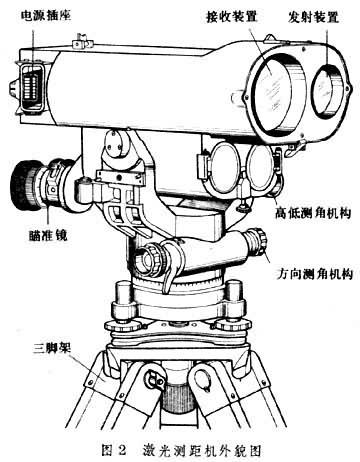 圖2 激光測距機外貌圖
圖2 激光測距機外貌圖
1888年英國的A.巴爾和W.斯特勞德發明瞭單眼合像測距機。1892年法國的H.de格魯西利爾設計出雙眼體視測距機。第二次世界大戰時,出現瞭不失調的體視測距機,受環境影響小,提高瞭測距精度。20世紀60年代出現瞭激光測距機。70年代以來,許多國傢的軍隊裝備瞭各種類型的激光測距機。激光測距機比光學測距機的測距精度高、體積小、操作方便,有取代光學測距機的趨勢。